Long-form writing on runtime, distributed systems, kernel internals, Go concurrency, memory models, eBPF, and assembly walkthroughs.
Blog

Generative AI nails plausible shapes but misses constraints, composition, and verification. A first-principles read of the gap, and the architecture that closes it.
2026-06-20
12 min read
Blog
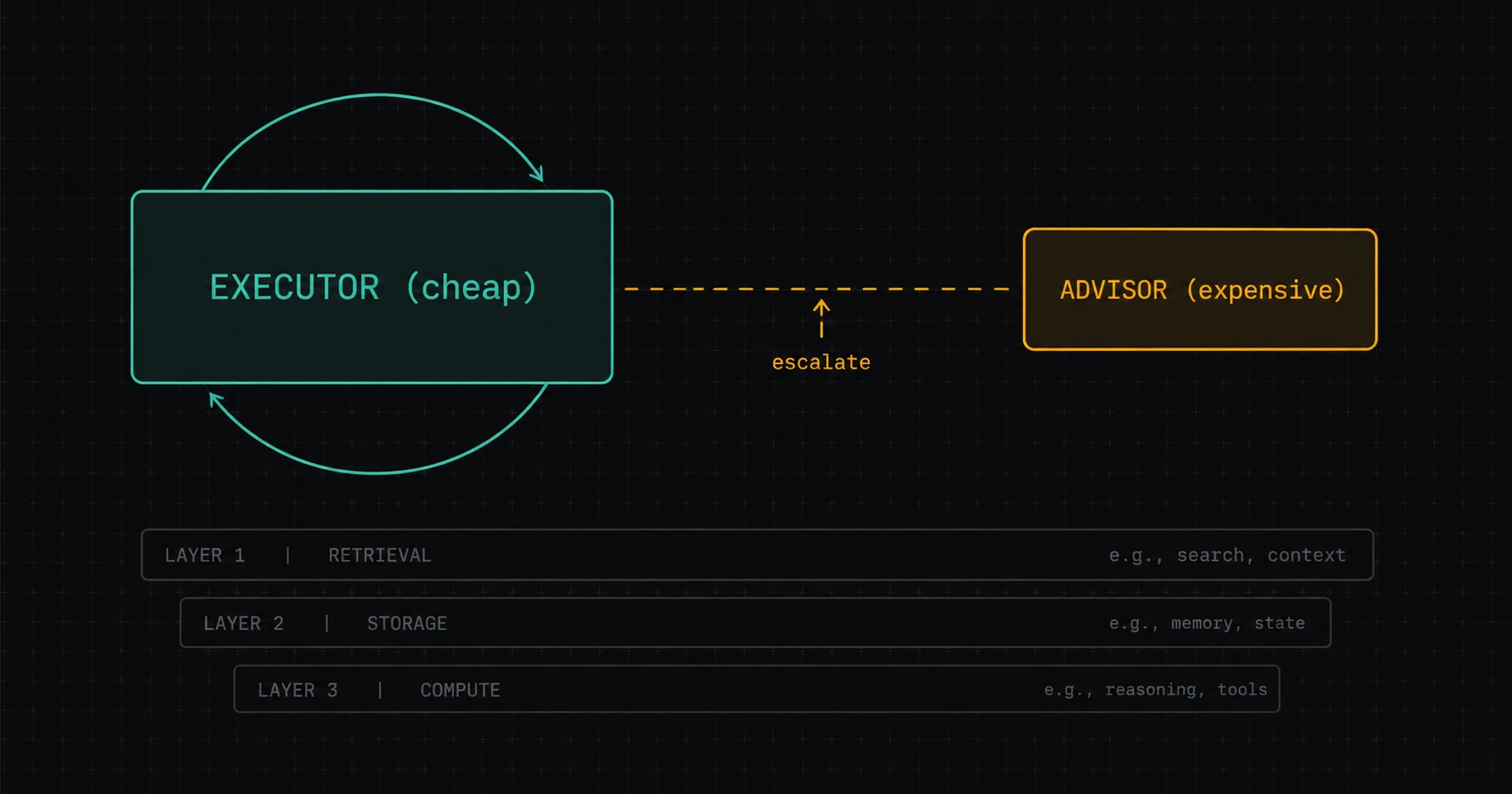
Anthropic named the advisor strategy in April. Tobi Lutke made it viral in May with Qwen plus GPT-5.5. Stanford's HazyResearch formalized the same shape earlier. One cost-curve frame unifies all three: a cheap executor runs the loop, an expensive advisor weighs in only at hard decisions. The third recursion.
2026-06-15
21 min read
Blog
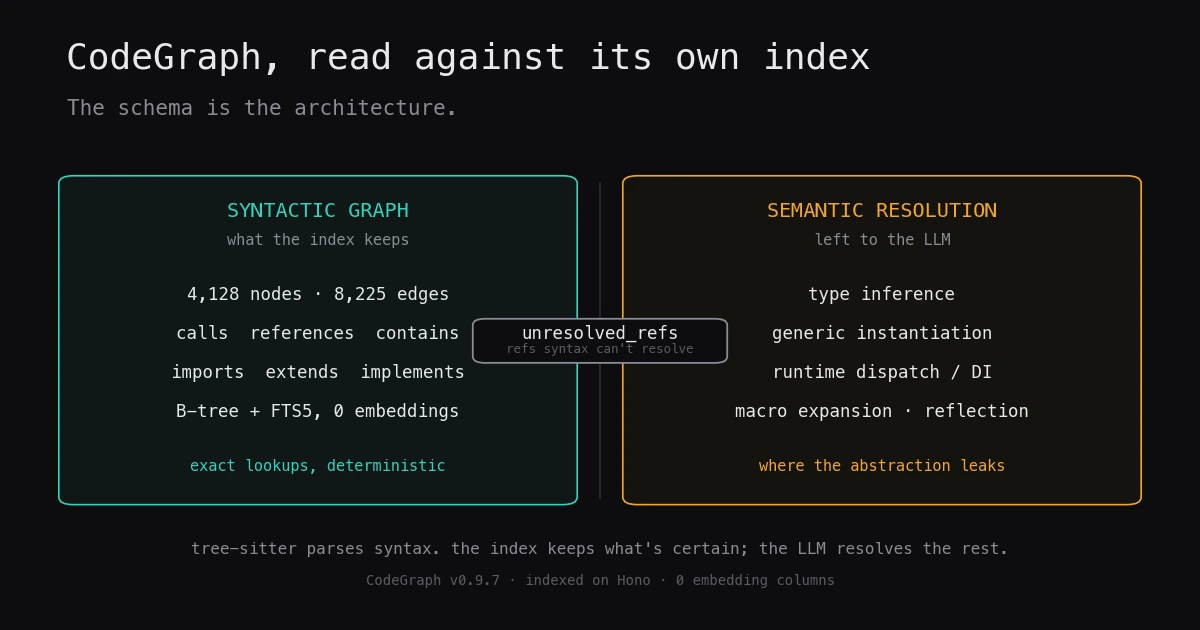
CodeGraph is the LLM-symbol-graph my prior retrieval post argued should exist. Read against its own SQLite index: why its architectural choices are right, and where the abstraction leaks.
2026-06-08
25 min read
Blog
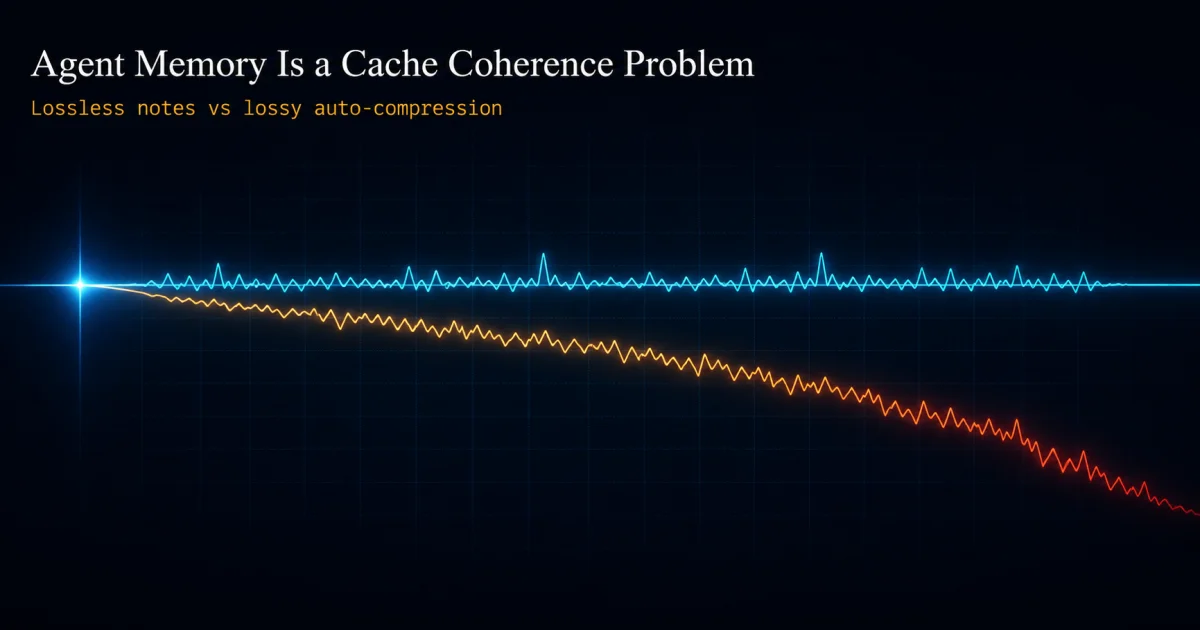
Lossless curated notes vs lossy auto-compression with vector recall: two AI-memory designs that fail differently. One fails like a cache — classical systems already mapped it.
2026-05-28
20 min read
Blog
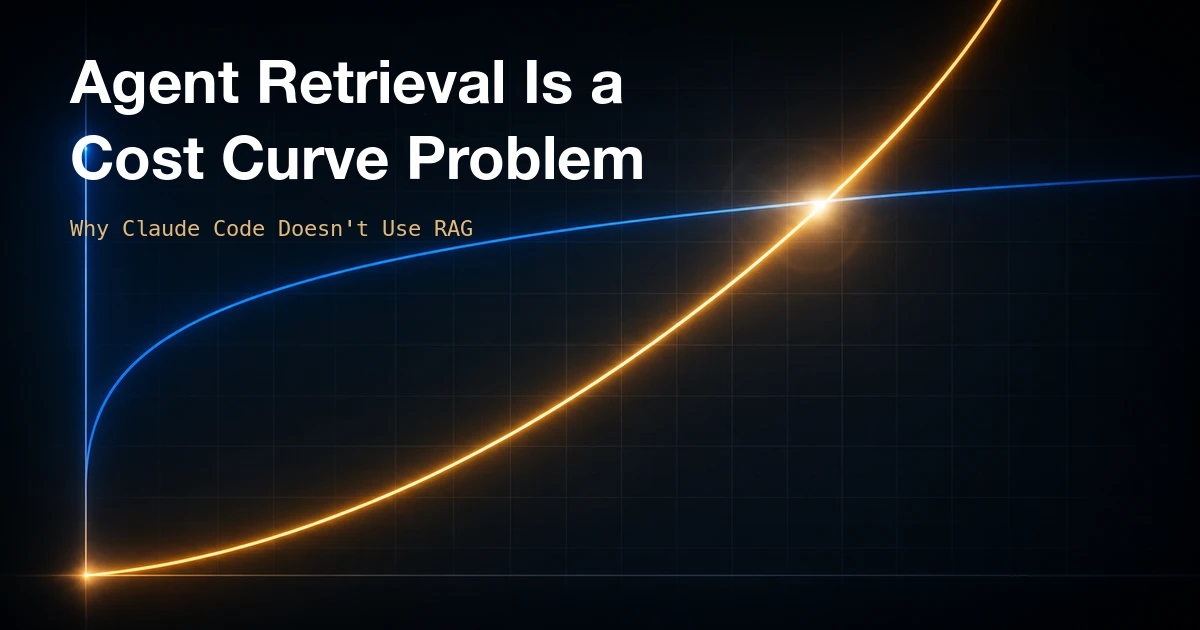
Why Claude Code uses grep instead of RAG: a cost-curve argument, audited against the source — with the Explore vs Fork A/B test nobody mentions.
2026-05-25
26 min read
Blog

Go channels are synchronization primitives, not queues. They deliver backpressure only when the producer is bounded — and that's where the real OOM hides.
2026-05-12
18 min read
Blog

Most discussions of Node vs Go concurrency stop at 'async vs threaded.' The real split is deeper — where does context switching happen, and what is the unit of scheduling?
2026-04-27
18 min read
Blog
Strong, eventual, causal, read-your-writes, linearizable — consistency models are taught as a taxonomy. Production uses them as a menu. Ten scenarios, the right consistency choice for each, and the engineering that makes the choice work.
2026-03-28
15 min read
Blog
gRPC interceptors are where cross-cutting concerns live — auth, tracing, retry, metrics, rate limiting. Most examples online show toy single-interceptor demos. Production systems need to stack, order, and compose them correctly. A practical guide.
2026-03-24
9 min read
Blog
Go 1.18 shipped generics in March 2022. Four years later, the honest picture: they're useful for a narrower set of problems than the community hoped, they fit naturally in a few places, and overuse them and your code gets worse. A production retrospective.
2026-03-18
8 min read